میکروسکوپهای نیروی اتمی (AFM)، دسته گستردهای از تجهیزات شناسایی در مقیاس نانو با عنوان میکروسکوپهای نیرویی را به خود اختصاص دادهاند. امروزه دستگاههای تجاری متفاوتی با مبانی مشابه و حالات کاری مختلف عرضه شدهاند که از نظر دقت و کیفیت تصاویر با یکدیگر تفاوت دارند. در این مقاله ضمن معرفی میکروسکوپ نیروی اتمی و نحوه عملکرد آن، مدهای کاری مختلف و مزایا و معایب هر کدام مورد بررسی قرار می گیرد.
این مقاله شامل سرفصلهای زیر است:
1. مقدمه
2. دامنه کاربرد میکروسکوپ نیروی اتمی
3. سیستم دستگاهی میکروسکوپ روبشی نیروی اتمی
1.3. آشکارسازی موقعیت کانتیلور
4. حالات کاری میکروسکوپ روبشی نیروی اتمی
1.4. حالت استاتیکی
1.1.4 حالت ارتفاع ثابت
2.1.4. حالت نیروی ثابت
3.1.4. انواع نیروهای موجود در عملیات روبش
1.3.1.4. نیروی اعمالی توسط کانتیلور
2.3.1.4. نیروی موئینگی (capillary)
2.4. حالت دینامیکی
5. مزایا و معایب حالات استاتیکی و دینامیکی
نتیجهگیری
این مقاله شامل سرفصلهای زیر است:
1. مقدمه
2. دامنه کاربرد میکروسکوپ نیروی اتمی
3. سیستم دستگاهی میکروسکوپ روبشی نیروی اتمی
1.3. آشکارسازی موقعیت کانتیلور
4. حالات کاری میکروسکوپ روبشی نیروی اتمی
1.4. حالت استاتیکی
1.1.4 حالت ارتفاع ثابت
2.1.4. حالت نیروی ثابت
3.1.4. انواع نیروهای موجود در عملیات روبش
1.3.1.4. نیروی اعمالی توسط کانتیلور
2.3.1.4. نیروی موئینگی (capillary)
2.4. حالت دینامیکی
5. مزایا و معایب حالات استاتیکی و دینامیکی
نتیجهگیری
1. مقدمه
گرد کارل بینیگ (Gerd Karl Binnig) بر اساس طراحیهای قبلی که با همکاری هاینرک روهرر (Heinrich Rohrer)، در آزمایشگاه تحقیقاتی زوریخ IBM، در جهت طراحی و ساخت میکروسکوپ تونلی روبشی، صورت داده بود، در سال 1986 میلادی با همکاری کلوین کوایت (Calvin Quate) و کریستف گربر (Christoph Geber) از دانشگاه استانفورد، میکروسکوپ نیروی اتمی (AFM) را ارائه کرد. هدف او از این کار اندازهگیری نیروهای بسیار ناچیز (کمتر از 1µN)، بین نوک سوزن AFM و سطح نمونه مورد بررسی بود [1, 2].
پس از آنکه در سال 1981 میلادی، میکروسکوپ تونلی رویشی (STM= scanning tunneling microscope) توسط گرهارد بینیگ (Gerd Binnig) و هاینرک روهرر (Heinrich Rohrer) اختراع شد، تلاشهای بسیاری بر اساس آن، در جهت توسعه روشهای مشخصهیابی در مقیاس نانو صورت پذبرفت. در سال 1986، گرهارد بینیگ، بر اساس تجربیاتی که از ساخت میکروسکوپ تونلی روبشی بهدست آورده بود، با همکاری کلوین کوات و کریستف گربر از دانشگاه استنفورد، میکروسکوپ نیروی اتمی (AFM) را اختراع کردند. تولیدات تجاری این محصولات، با میکروسکوپ STM در سال 1987 میلادی و میکروسکوپهای AFM، در 1989 میلادی کلید خورد. به دنبال اختراع STM و سپس AFM، تلاشهای بسیاری جهت مطالعه مورفولوژی و ساختار سطوح و فصل مشترک آنها صورت گرفت و در بازه کوتاهی از زمان، بسیاری دیگر از ابزارهای شناسایی با مبانی مشابه در عملکرد، تحت عنوان کلی میکروسکوپهای پروبی روبشی، ساخته و به جهان علم ارائه شدند [3-5].
2. دامنه کاربرد میکروسکوپ نیروی اتمی
در حالی که میکروسکوپ تونلی روبشی، تنها میتواند جهت مطالعه سطوحی که از لحاظ الکتریکی درجاتی از رسانایی را دارند، استفاده شود، میکروسکوپهای نیروی اتمی میتوانند جهت مطالعه هر نوع سطح مهندسی استفاده شوند؛ بنابراین میتوان از آن جهت مطالعه انواع مواد رسانا، نیمهرسانا و نارسانا استفاده کرد.
امروزه AFM، یک کاوشگر سطحی محبوب برای اندازهگیریهای توپوگرافیک و محاسبه نیروهای عمودی در مقیاس میکرو تا نانو شناخته شده است [6]. همچنین از این دستگاه مشخصهیابی، میتوان برای مطالعه خراش و سائیدگی و نیز اندازهگیری خواص مکانیکی الاستیک و پلاستیک (از قبیل میزان سختی جسم در برابر جسم فرورونده (indentation hardness) و مدول الاستیسیته) استفاده کرد [4, 6-19].
AFM در بسیاری از مطالعات، جهت نوشتار، دستکاری و جابهجایی اتمهای منفرد زنون [20]، مولکولها [21]، سطوح سیلیکونی [22] و پلیمری [23] بهکار گرفته شدهاند. به علاوه این میکروسکوپها جهت انواع نانولیتوگرافی و تولید نانوساختارها [4, 6, 19, 24-26] و نانوماشینکاری استفاده شدهاند.
میکروسکوپهای نیروی اتمی که برای اندازهگیری نیروهای عمودی و جانبی، طراحی شدهاند، میکروسکوپهای نیروی جانبی (LFM)، یا میکروسکوپهای نیروی اصطکاکی (FFM) نامیده میشوند [4, 7, 27-31]. دستهای از FFMها از توانایی اندازهگیری نیروهای جانبی در دو جهت متعامد برخوردارند [32-35]. تعدادی از تحقیقات، طراحیهای AFM و FFM را اصلاح کرده و بهبود داده است و این سیستمهای بهبود داده شده، جهت اندازهگیری چسبندگی و اصطکاک و نیروهای پیوندی در سطوح جامد و مایع در مقیاس نانو و میکرو بهکار میروند [6, 8-11, 13, 14, 19, 26, 35-39].
3. سیستم دستگاهی میکروسکوپ روبشی نیروی اتمی
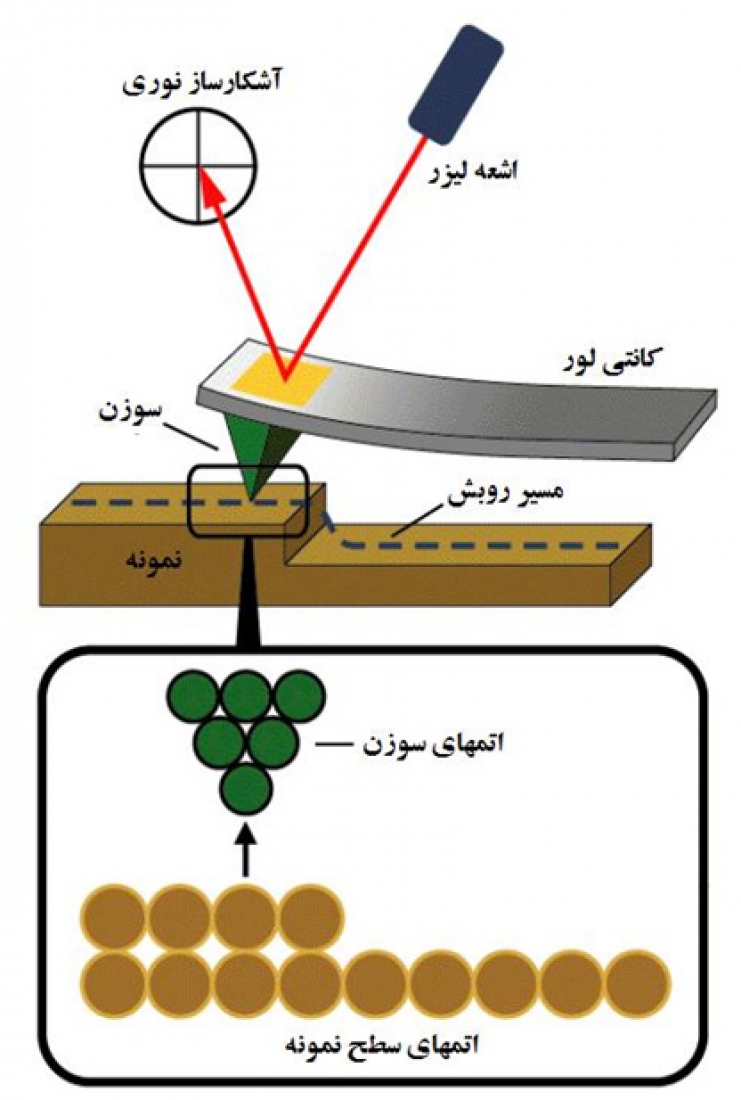
میکروسکوپ روبشی نیروی اتمی AFM سطح نمونه را توسط یک سوزن تیز، به طول 2 میکرون و غالباً قطر نوک کمتر از 10 نانومتر آنالیز میکند. سوزن در انتهای آزاد یک کانتیلور (انبرک= cantilever) به طول حدود 100 تا 450 میکرون قرار دارد [4].
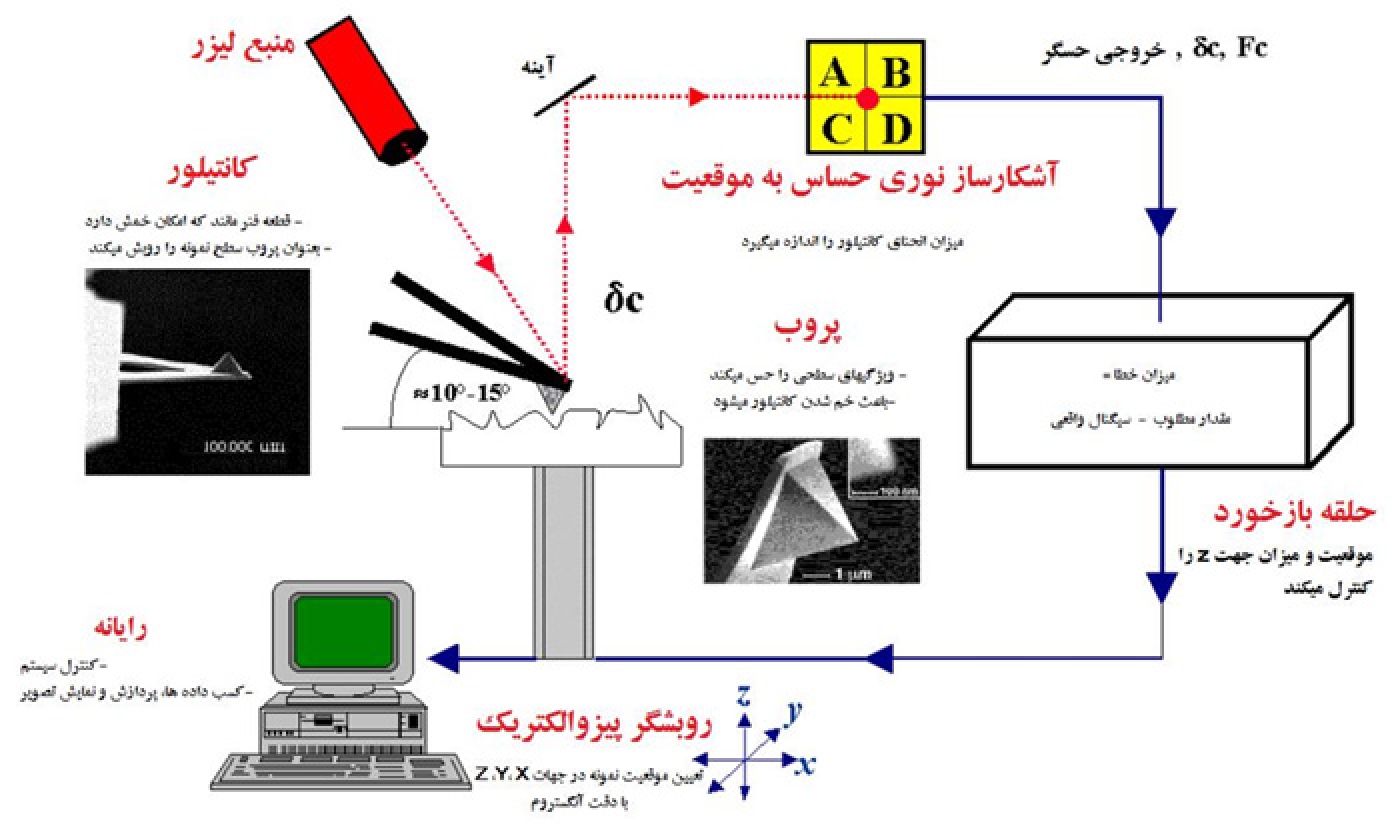
نیروهای بین سوزن و سطح نمونه باعث خم شدن یا انحراف کانتیلور شده و یک آشکارساز میزان انحراف کانتیلور را، در حالی که سوزن سطح نمونه را روبش میکند یا نمونه در زیر سوزن روبش میشود، در سیستمهایی که نمونه حرکت روبشی را انجام میدهد، اندازه میگیرد. میتوان از انحراف کانتیلور برای ورودی یک مدار بازخورد استفاده کرد که روبشگر پیزو را در مواجهه با توپوگرافی سطح نمونه به گونهای در جهت z بالا و پایین میبرد که میزان انحراف کانتیلور ثابت بماند. اندازهگیری انحرافات کانتیلور، به کامپیوتر امکان تولید تصویر توپوگرافی سطح را میدهد.
1.3. آشکارسازی موقعیت کانتیلور
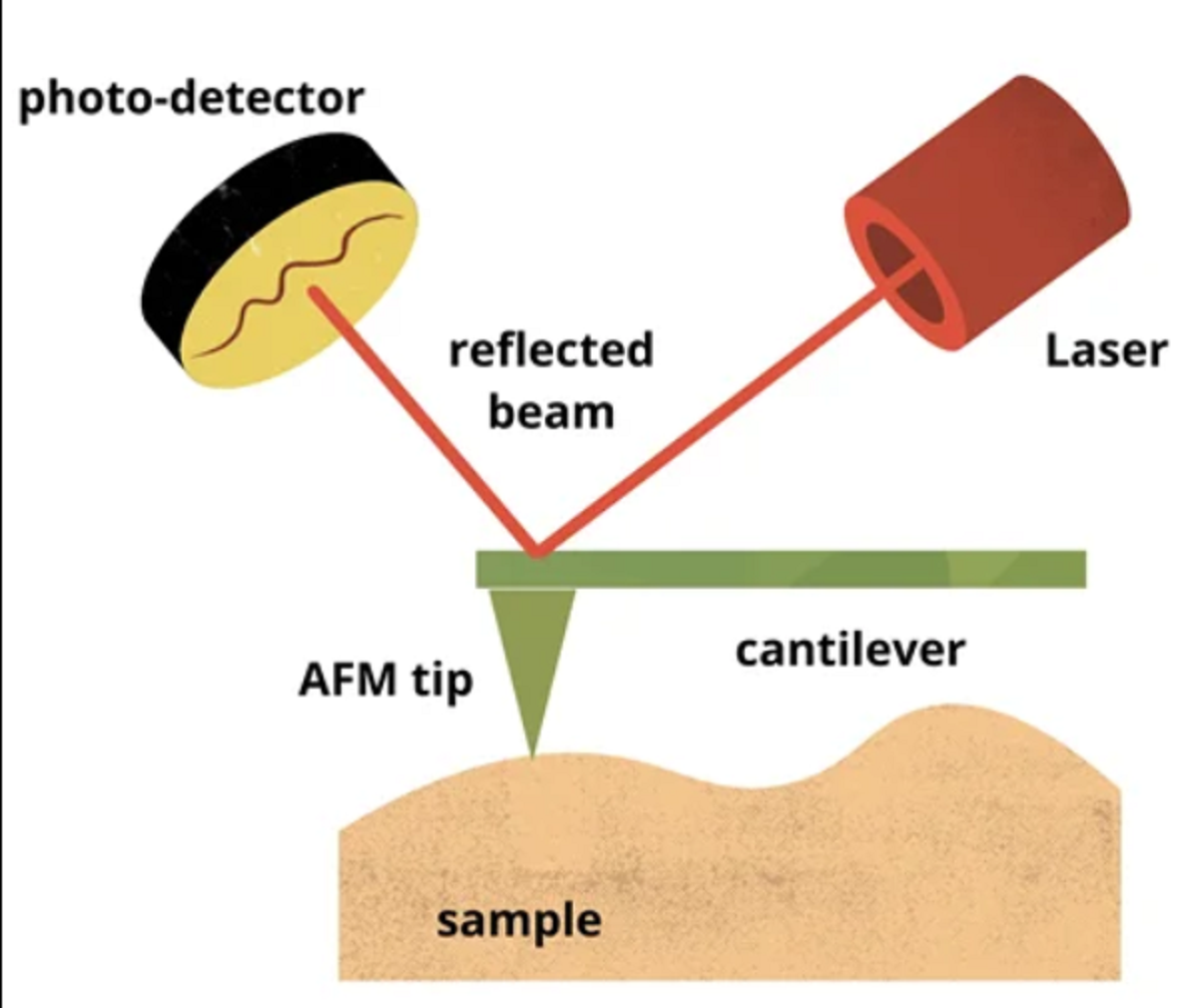
در اغلب AFMهایی که امروزه عرضه میشود، موقعیت کانتیلور با استفاده از روشهای اپتیکی تعیین میشود. متداولترین آنها در شکل 3 نشان داده شده است.
یک اشعه لیزری به پشت کانتیلور برخورد میکند و به سمت یک آشکارساز نوری حساس به موقعیت (PSPD= Position-sensitive photo detrector) منعکس میشود. با خم شدن کانتیلور، محل اشعه لیزر روی آشکارساز تغییر کرده و PSPD میتواند جابهجایی به کوچکی 10 آنگستروم (1 نانومتر) را اندازهگیری کند. نسبت فاصله بین کانتیلور و آشکارساز به طول کانتیلور به عنوان یک تقویتکننده مکانیکی عمل میکند. در نتیجه سیستم میتواند حرکت عمودی کمتر از آنگستروم نوک کانتیلور را اندازهگیری کند. روشی دیگر جهت آشکارسازی، انحراف آشکارساز بر مبنای تداخل اپتیکی است.
یک تکنیک بسیار ظریف دیگر جهت آشکارسازی، ساختن کانتیلور از یک ماده پیزومقاومتی (piezoresistive) است به گونهای که انحراف را بهصورت سیگنال الکتریکی آشکار کند. در مواد پیزومقاومتی، تنش ناشی از تغییر فرم مکانیکی باعث تغییر مقاومت الکتریکی ماده میشود. برای آشکارسازی پیزومقاومتی نیازی به اشعه لیزر و PSPD نیست؛ وقتی که AFM انحراف کانتیلور را آشکار کرد، میتواند اطلاعات توپوگرافی را در دو حالت ارتفاع ثابت یا نیروی ثابت تولید کند. در جدول 1، خواص مربوط به مواد مورد استفاده رایج در ساخت کانتیلورها ذکر شدهاند.
جدول 1- خواص مربوط به مواد مورد استفاده رایج در ساخت کانتیلورها [5, 27]
| نوع ماده | مدول یانگE(GPa) | دانسیته(Kq/m3)(ρ) | ریزسختی(GPa) |
| الماس | 900-1050 | 3515 | 78/4-102 |
| Si3N4 | 310 | 3180 | 19/6 |
| Si | 130-188 | 2330 | 9-10 |
| W | 350 | 19310 | 3/2 |
| Ir | 530 | – | 3~ |
4. حالات کاری میکروسکوپ روبشی نیروی اتمی
در هنگام کار با میکروسکوپ نیروی اتمی، نیروهای مختلفی در انحراف کانتیلور AFM مشارکت میکنند؛ از جمله این نیروها میتوان به نیروهای بین اتمی یا نیروهای واندروالس اشاره کرد. وابستگی نیروی واندوالس به فاصله سوزن و نمونه در شکل 4، نشان داده شده است.
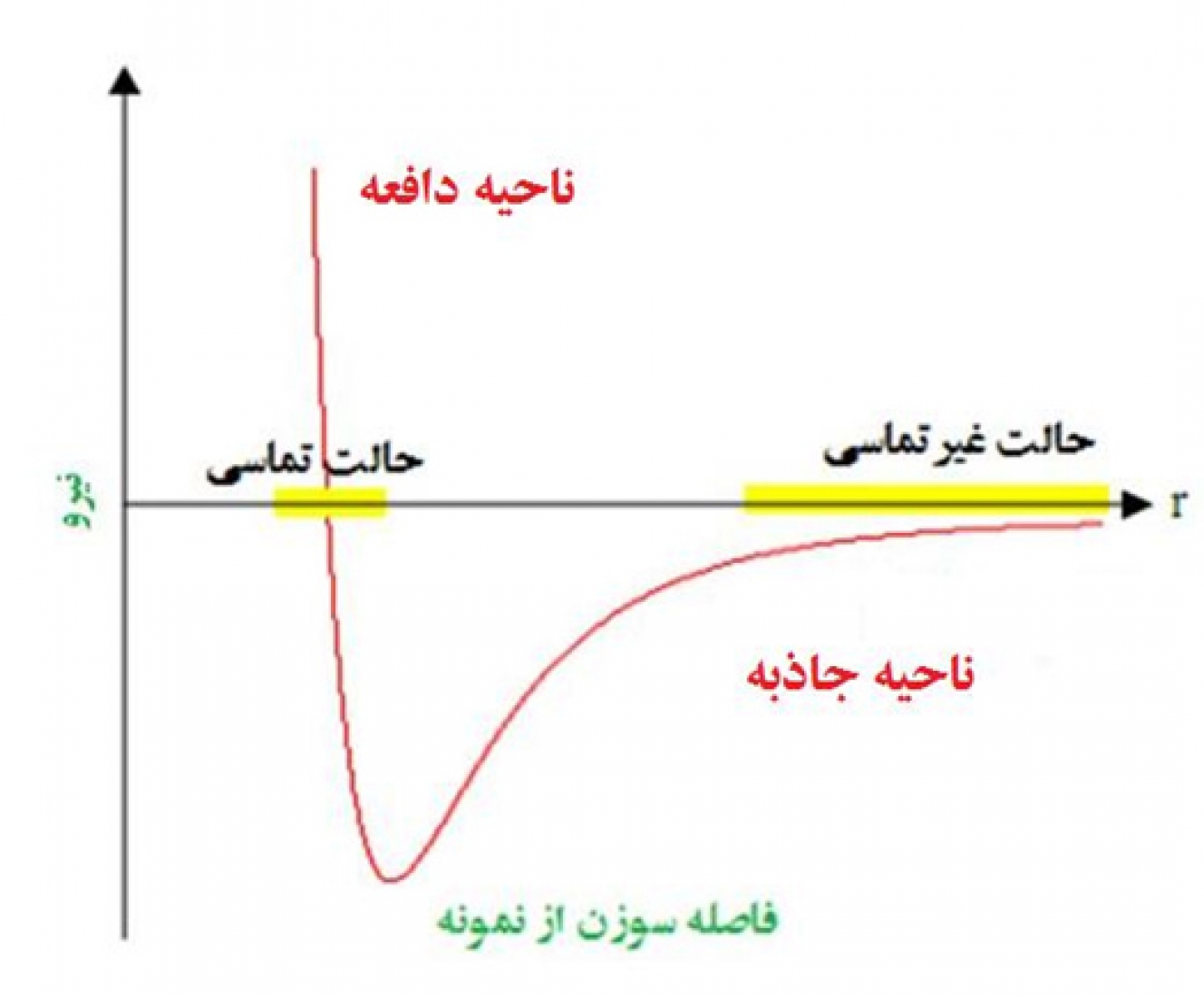
در شکل 4، دو حالت مربوط به دو ناحیه علامتگذاری شده است:
1) حالت استاتیکی (DC-AFM)(یا حالت دفعی)
2) حالت دینامیکی (AC-AFM)(یا حالت جذبی)
1) حالت استاتیکی (DC-AFM)(یا حالت دفعی)
2) حالت دینامیکی (AC-AFM)(یا حالت جذبی)
1.4. حالت استاتیکی
در حالت استاتیکی کانتیلور در فاصله کمتر از چند آنگستروم از سطح نمونه قرار داده میشود. نیروی بین اتمی بین کانتیلور و نمونه نیروی دافعه است. سوزن به انتهای کانتیلوری با ثابت فنر کم (کمتر از ثابت فنر مؤثری که اتمهای نمونه را به هم متصل میکند)، وصل شده است و تماس فیزیکی ملایمی با نمونه برقرار میکند. هنگامی که روبشگر، سوزن را به آرامی روی سطح نمونه روبش میکند، نیروی استاتیکی باعث خم شدن کانتیلور میشود تا بتواند تغییرات توپوگرافی سطح را دنبال کند.
با نزدیک کردن اتمها، از سمت راست منحنی شکل 4، ابتدا آنها یکدیگر را بهطور ضعیفی جذب میکنند. این جاذبه افزایش مییابد تا جائیکه آنقدر اتمها به هم نزدیک میشوند که ابرهای الکترونی آنها بهصورت الکترواستاتیکی شروع به دفع یکدیگر میکنند. با کاهش فاصله بین اتمی، این دافعه الکترواستاتیکی بهطور فزایندهای نیروهای جاذبه را تضعیف میکند.
وقتی که فاصله بین اتمها به یک یا دو آنگستروم، حدود طول یک پیوند شیمیایی، میرسد، نیرو صفر میشود. در نتیجه نیروی دافعه واندروالس تقریباً با هر نیرویی که بخواهد اتمها را به هم نزدیکتر کند، مقابله میکند. در چنین فاصلههایی، کانتیلور از طریق سوزن به نمونه فشار میآورد و به جای اینکه اتمهای سوزن به اتمهای نمونه نزدیکتر شوند، کانتیلور خم میشود.
در صورت وجود کانتیلور خیلی مقاوم، نیروی زیادی به روی نمونه اعمال میشود و احتمالاً سطح نمونه تغییر فرم مییابد که این حالت در نانولیتوگرافی (nanolithography) مورد استفاده قرار میگیرد.
1.1.4 حالت ارتفاع ثابت
در حالتی که ارتفاع روبشگر پیزو در حین روبش ثابت است، تغییرات انحراف کانتیلور میتواند مستقیماً برای تولید اطلاعات توپوگرافی استفاده شود. از این حالت، اغلب برای ایجاد تصاویر در مقیاس اتمی از سطوحی که در حد اتمی مسطح هستند، استفاده میشود. در اینجا انحرافات کانتیلور و بنابراین تغییرات در نیروی اعمالی، کوچک است. حالت ارتفاع ثابت برای ثبت تصاویر همزمان (Real time) سطوح در حال تغییر، که سرعت بالای روبش ضروری است، مناسب است.
2.1.4. حالت نیروی ثابت
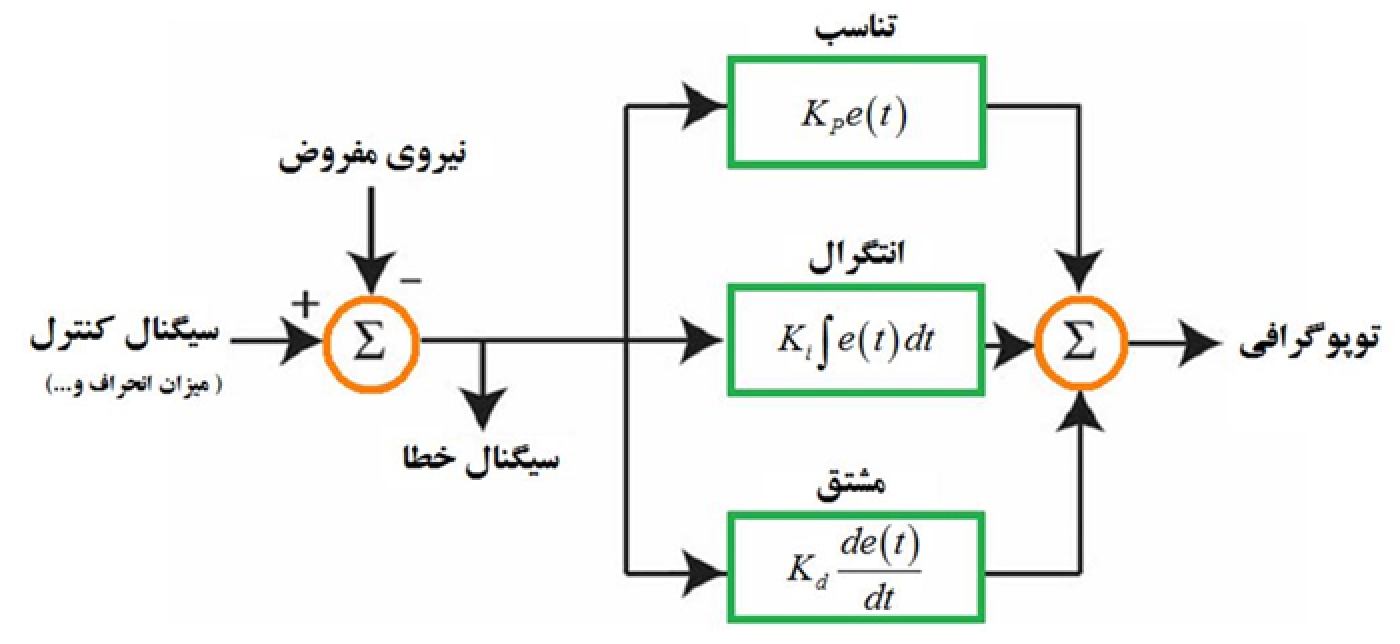
میتوان از انحراف کانتیلور برای ورودی یک مدار بازخورد استفاده کرد که روبشگر پیزو را در مواجهه با توپوگرافی سطح نمونه به گونهای در جهت z بالا و پایین میبرد که میزان انحراف کانتیلور ثابت بماند. در این مورد، تصویر از حرکت روبشگر پیزو تولید میشود. با ثابت نگهداشتن انحراف کانتیلور، کل نیروی اعمالی بر نمونه ثابت خواهد بود. در حالت نیروی ثابت، سرعت روبش با زمان واکنش مدار بازخورد محدود میشود، ولی کل نیروی اعمالی توسط سوزن بر نمونه، به خوبی کنترل میشود. برای بسیاری از کاربردها، حالت نیروی ثابت ترجیح داده میشود.
3.1.4. انواع نیروهای موجود در عملیات روبش
میکروسکوپهای نیروی اتمی در حین کار، با نیروهایی نظیر نیروهای کوتاه برد، الکترواستاتیک، موئینگی و … روبهرو هستند. بهعنوان مثال در ادامه، به دو نیرویی که علاوه بر نیروی دافعه واندروالس، در حین عملیات AFM استاتیکی حضور دارند، اشاره میشود:
1.3.1.4. نیروی اعمالی توسط کانتیلور
نیرویی که توسط خود کانتیلور اعمال میشود، مانند نیروی یک فنر فشرده است؛ اندازه و علامت (جاذبه یا دافعه) نیروی کانتیلور به انحراف کانتیلور و ثابت فنر آن بستگی دارد.
2.3.1.4. نیروی موئینگی (capillary)
نیروی موئینگی معمولاً توسط لایه نازک آب (که ممکن است از رطوبت محیط ناشی شود) اعمال میشود. نیروی موئینگی هنگامی بهوجود میآید که لایهای از آب دور سوزن ایجاد شود. در این حالت نیروی جاذبه قوی حدود 8-10 نیوتن پدیدار میشود که در این حالت سوزن را در تماس با سطح نگه میدارد. بزرگی نیروی موئینگی به فاصله سوزن تا نمونه بستگی دارد. تا زمانی که سوزن با نمونه تماس دارد، نیروی موئینگی ثابت است. همچنین فرض میشود که لایه آب تقریباً همگن است. در نتیجه، نیروی متغیر در AFM استاتیکی باید توسط نیروی دافعه واندروالس جبران شود. اندازه نیروی کل اعمال شده بر نمونه از 8-10 نیوتن (در شرایطی که تقریباً آب سوزن را به طرف نمونه میکشد و کانتیلور آن را از نمونه میراند) تا محدوده معمولتر 6-10 تا 7-10 نیوتن تغییر میکند [4].
2.4. حالت دینامیکی
میکروسکوپهای نیروی اتمی دینامیکی، یکی از چند تکنیک کانتیلور ارتعاشی (vibrating) است که در آن کانتیلور AFM در نزدیکی سطح نمونه ارتعاش میکند. در حالت دینامیکی، کانتیلور در فاصله چند ده تا چند صد آنگستروم از سطح نمونه قرار داده میشود و در این حالت نیروی بیناتمی بین کانتیلور و نمونه (عمدتاً به دلیل برهمکنشهای واندروالس دوربرد (Long-range))، نیروی جاذبه است. فاصله حدود چند ده تا چند صد آنگستروم در منحنی واندروالس، به عنوان منطقه دینامیکی یا جذبی مشخص شده است.
در حالت دینامیکی سیستم، کانتیلور را در نزدیکی فرکانس رزونانس آن (400-100 هرتز) و دامنه چند دهم آنگستروم میلرزاند. سپس تغییرات فرکانس رزونانس یا دامنه لرزش با نزدیک شدن سوزن به سطح نمونه اندازهگیری میشود. حساسیت این روش، دستیابی به قدرت تفکیک عمودی زیر آنگستروم تصویر را (مانند AFMهای استاتیکی) فراهم میکند.
رابطه بین فرکانس کانتیلور و تغییرات توپوگرافی نمونه را میتوان اینگونه توضیح داد:
فرکانس رزونانس کانتیلور متناسب با جذر ثابت فنر آن تغییر میکند. علاوه بر این، ثابت فنر کانتیلور با گرادیان اعمال نیرو بر کانتیلور تغییر میکند. بالاخره گرادیان نیرو که از منحنی نیرو در برابر فاصله مشتق میشود، با فاصله سوزن تا نمونه تغییر میکند. بنابراین تغییر فرکانس رزونانس کانتیلور میتواند به عنوان معیاری برای تغییر نیرو استفاده شود که به نوبه خود تغییرات فاصله تا نمونه (یا توپوگرافی نمونه) را منعکس میکند.
در حالت AFM دینامیکی، سیستم، فرکانس رزونانس یا دامنه ارتعاش کانتیلور را اندازهگیری میکند و آن را به کمک یک سیستم بازخورد که روبشگر پیزو را بالا و پایین میبرد، ثابت نگه میدارد.
با ثابت نگهداشتن فرکانس رزونانس یا دامنه، سیستم متوسط فاصله سوزن تا نمونه را نیز ثابت نگه میدارد. همانند AFM استاتیکی (در حالت نیروی ثابت)، حرکت روبشگر پیزو برای تولید اطلاعات استفاده میشود.
5. مزایا و معایب حالات استاتیکی و دینامیکی
مزایای میکروسکوپهای نیروی اتمی دینامیکی بدین صورت است که توپوگرافی نمونه بدون تماس یا با تماس خیلی کم بین سوزن و نمونه اندازهگیری میشود. کل نیروی بین سوزن و نمونه در حالت دینامیکی بسیار کم است (معمولاً حدود 12-10 نیوتن). این نیروی کم، مزیتی برای مطالعه نمونههای نرم یا الاستیک به شمار میرود. همچنین نمونههایی مانند ویفرهای سیلیکونی (Silicon wafers) از طریق تماس با سوزن آلوده نمیشوند. از طرف دیگر به دلیل اینکه نیروی بین سوزن و نمونه در حالت دینامیکی کم است، اندازهگیری آن مشکلتر از نیروی چندین بار بزرگتر حالت استاتیکی است.
علاوه بر این، کانتیلورهای استفاده شده برای AFMهای دینامیکی باید نسبت به کانتیلورهای AFMهای استاتیکی سفتتر باشند، زیرا کانتیلور نرم میتواند به طرف سمت سطح نمونه کشیده شده و در تماس با آن قرار گیرد. از طرفی، حالت دینامیکی برای اندازهگیری نمونههای نرم بر حالت استاتیکی ترجیح داده میشود.
مقدار کم نیرو و سفت بودن کانتیلورها، در حالت دینامیکی، هر دو عواملی هستند که سیگنال AFM دینامیکی را کوچک میکنند. از همینرو اندازهگیری تغییرات در سیگنال مشکل است و نیاز به یک روش آشکارسازی AC حساس دارد.
در مورد حالت دینامیکی، مشکل از بین رفتن سوزن یا نمونه، که گاهی بعد از اسکنهای فراوان توسط حالت استاتیکی مشاهده میشود، وجود ندارد.
در مورد نمونههای صلب ممکن است تصاویر AFM استاتیکی و دینامیکی به یک شکل بهنظر برسند، ولی اگر برای مثال چند لایه آب روی سطح یک نمونه صلب میعان کرده باشد، ممکن است تصاویر کاملاً متفاوت باشند. AFM که در حالت استاتیکی کار میکند میتواند به این لایه نفوذ کند و سطح زیر آن را تصویر کند، در حالی که در حالت AFM دینامیکی، سطح مایع را تصویر میکند.
جدول 2- نقاط قوت و ضعف حالات کاری AFM ا[42]
| تماسی | غیرتماسی | |
| نقاط قوت |
|
|
| نقاط ضعف |
|
|
نتیجهگیری
در میکروسکوپ نیرو اتمی، نیروی بین سوزن روبشگر و سطح نمونه که باعث خم شدن کانتیلور میشود، توسط آشکارساز اندازهگیری میشود. علاوه بر اینکه از این میکروسکوپها میتوان جهت انواع نانولیتوگرافی و تولید نانوساختارها و نانوماشینکاری استفاده کرد، میتوان آنها را برای مطالعه خواص مکانیکی، سایش یا خراش و …نیز بهکار برد. این میکروسکوپها با دو حالت کاری استاتیکی (تماسی) و دینامیکی (غیرتماسی) کار میکنند. در حالت استاتیکی، کانتیلور در فاصله کم از سطح نمونه قرار دارد که هنگام روبش سوزن روی سطح نمونه، نیروی استاتیکی باعث خم شدن کانتیلور میشود. در این حالت نیروی بین کانتیلور و نمونه، نیروی دافعه است. حالت استاتیکی با دو مد کاری ارتفاع ثابت و نیرو ثابت کار میکند. در حالت دینامیکی، فرکانس رزونانس کانتیلور میتواند به عنوان معیار تغییر نیرو (یا تغییر فاصله سوزن تا نمونه) استفاده شود. در این حالت نیروی اتمی بین کانتیلور و نمونه، از نوع جاذبه است. در این حالت بهعلت عدم تماس با نمونههای نرم، تخریبی ایجاد نمیشود اما نسبت به حالت تماسی، سرعت روبش کمتری دارد.
منابـــع و مراجــــع
۱ – G. Binnig, C.F. Quate, C. Gerber, Atomic force microscope, Phys. Rev. Lett. 56, 930–933(1986).
۲ – G. Binnig, C. Gerber, E. Stoll, T.R. Albrecht, C.F. Quate, Atomic resolution with atomic force microscope, Europhys. Lett. 3, 1281–1286 (1987).
۳ – http://edu.nano.ir/index.php/articles/show/81
۴ – ع.ذوالفقاری،م.الماسی،پ.مرعشی،م.نجبا،ا.سیفی،”میکروسکوپ پروبی روبشی آزمایشگاهی روی نوک سوزن”،تهران،پیکنور، (1385).
۵ – Bharat Bhushan, “Springer Handbook of Nanotechnology”, USA, Springer, (2004).
۶ – J.A. Stroscio, W.J. Kaiser (Eds.), Scanning Tunneling Microscopy (Academic, Boston 1993) 102. H.J. Guntherodt, D. Anselmetti, E. Meyer (Eds.), Forces in Scanning Probe Methods (Kluwer, Dordrecht 1995).
۷ – H.-J. Guentherodt, R. Wiesendanger (Eds.), “Scanning Tunneling Microscopy”, Vol. I, II,III, Springer, (1993, 1995, 1996).
۸ – B. Drake, C.B. Prater, A.L. Weisenhorn, S.A.C. Gould, T.R. Albrecht, C.F. Quate, D.S. Cannell, H.G. Hansma, P.K. Hansma, Imaging crystals, polymersprocessesin water with the atomic force microscope, Science 243, 1586–1589 (1989).
۹ – B. Bhushan, PrinciplesApplications of TribologyWiley, New York (1999).
۱۰ – B. Bhushan, Modern Tribology Handbook – Vol. 1: Principles of Tribology (CRC, Boca Raton 2001).
۱۱ – B. Bhushan, Introduction to Tribology (Wiley, New York 2002).
۱۲ – G.Meyer, N.M. Amer, Novel optical approach to atomic force microscopy, Appl. Phys. Lett. 53, 1045–1047 (1988).
۱۳ – B. Bhushan, S. Sundararajan, Micro-/nanoscale frictionwear mechanisms of thin films using atomic forcefriction force microscopy, Acta Mater. 46, 3793–3804 (1998).
۱۴ – N.A. Burnham, R.J. Colton, Measuring the nanomechanical propertiessurface forces of materials using an atomic force microscope, J. Vac. Sci. Technol. A 7, 2906–2913 (1989).
۱۵ – P. Maivald, H.J. Butt, S.A.C. Gould, C.B. Prater, B. Drake, J.A. Gurley, V.B. Elings, P.K. Hansma, Using force modulation to image surface elasticities with the atomic force microscope, Nanotechnology 2, 103–106 (1991).
۱۶ – B. Bhushan, A.V. Kulkarni, W. Bonin, J.T. Wyrobek, Nano/picoindentation measurements using capacitive transducer in atomic force microscopy, Philos. Mag. A 74, 1117–1128, (1996).
۱۷ – B. Bhushan, V.N. Koinkar, Nanoindentation hardness measurements using atomic force microscopy, Appl. Phys. Lett. 75, 5741–5746 (1994).
۱۸ – D. DeVecchio, B. Bhushan, Localized surface elasticity measurements using an atomic force microscope, Rev. Sci. Instrum. 68, 4498–4505 (1997).
۱۹ – B. Bhushan, Micro-/nanotribologyitsapplications to magnetic storage devicesMEMS, Tribol. Int. 28, 85–96 (1995).
۲۰ – D.M. Eigler, E.K. Schweizer, Positioning single atoms with a scanning tunnelling microscope, Nature 344, 524–528 (1990).
۲۱ – A.L. Weisenhorn, J.E. MacDougall, J.A.C. Gould, S.D. Cox, W.S. Wise, J. Massie, P.Maivald, V.B. Elings, G.D. Stucky, P.K. Hansma, Imagingmanipulating of molecules on a zeolite surface with an atomic force microscope, Science 247, 1330–1333 (1990).
۲۲ – I.W. Lyo, P. Avouris, Field-induced nanometer-to-atomic-scale manipulation of silicon surfaces with the STM, Science 253, 173–176 (1991).
۲۳ – O.M. Leung, M.C. Goh, Orientation ordering of polymers by atomic force microscope tip-surface interactions, Science 225, 64–66 (1992).
۲۴ – A.Majumdar, P.I. Oden, J.P. Carrejo, L.A. Nagahara, J.J. Graham, J. Alexander, Nanometer scale lithography using the atomic force microscope, Appl. Phys. Lett. 61, 2293–2295 (1992).
۲۵ – L. Tsau, D. Wang, K.L. Wang, Nanometer scale patterning of silicon(100) surface by an atomic force microscope operating in air, Appl. Phys. Lett. 64, 2133–2135 (1994).
۲۶ – E. Delawski, B.A. Parkinson, “Layer-by-layer etching of two-dimensional metal chalcogenides with the atomic force microscope”, J. Am. Chem. Soc. 114, 1661–1667 (1992).
۲۷ – B. Bhushan, O. Marti, “Scanning Probe Microscopy – Principle of Operation, Instrumentation,Probes” , NanotribologyNanomechanics, Springer, (2011).
۲۸ – G. Binnig, H. Rohrer, Scanning tunnelling microscopy, Surf. Sci. 126, 236–244 (1983).
۲۹ – R.L. Nicolaides, W.E. Yong, W.F. Packard, H.A. Zhou, Scanning tunneling microscope tip structures, J. Vac. Sci. Technol. A 6, 445–447 (1988).
۳۰ – J.P. Ibe, P.P. Bey, S.L. Brandon, R.A. Brizzolara, N.A. Burnham, D.P. DiLella, K.P. Lee, C.R.K. Marrian, R.J. Colton, On the electrochemical etching of tips for scanning tunneling microscopy, J. Vac. Sci. Technol. A 8, 3570–3575 (1990).
۳۱ – K.S. Birdi, “Scanning probe microscopes : applications in sciencetechnology”,USA, (2003).
۳۲ – J. Stroscio, W.J. Kaiser (Eds.),”Scanning Tunneling Microscopy”, Academic Press, (1993).
۳۳ – D. Bonnell, (Ed.),”Scanning Probe MicroscopySpectroscopy: Theory, Techniques,Applications”, 2nd ed., Wiley-VCH, New York, (2001).
۳۴ – R. Wiesendanger, “Scanning Probe MicroscopySpectroscopy: MethodsApplications”,Cambridge University Press, (1998).
۳۵ – V.N. Koinkar, B. Bhushan, Microtribological studies of unlubricatedlubricated surfaces using atomic force/friction force microscopy, J. Vac. Sci. Technol. A 14, 2378–2391 (1996).
۳۶ – Paolo Samori, “Scanning Probe Microscopies Beyond Imaging”, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim, (2006).
۳۷ – M. Binggeli, R. Christoph, H.E. Hintermann, J. Colchero, O. Marti, Friction force measurements on potential controlled graphite in an electrolytic environment, Nanotechnology 4, 59–63 (1993).
۳۸ – K. Yamanaka, H. Ogisco, O. Kolosov, Ultrasonic force microscopy for nanometer resolution subsurface imaging, Appl. Phys. Lett. 64, 178–180 (1994).
۳۹ – C.D. Frisbie, L.F. Rozsnyai, A. Noy,M.S.Wrighton, C.M. Lieber, Functional group imaging by chemical force microscopy, Science 265, 2071–2074 (1994).
۴۰ – http://www.natsyco.com/
۴۱ – http://depts.washington.edu/nanolab/
۴۲ – A. V.Clemente, K. Gloystein, N. Frangis, “Principles ofAtomic Force Microscopy(AFM)”, Physics of Advanced Materials Winter School, (2008).